Image Classification Principles Պատկերների դասակարգման սկզբունքները

Reading time
Content
Նպատակ՝ դասակարգել պատկերի օբյեկտները կամ գնահատել օբյեկտի մոդելի պարամետրերը։
Պատկեր՝ ընդգրկում է ուսումնասիրվող ֆիզիկական մակերեսը։ Հեռազննման համատեքստում սրանք սենսորով դիտարկվող իրական ֆիզիկական էակներ են կամ օբյեկտները՝ իրենց շրջակայով։ Օբյեկտների մակերեւույթները նմուշառվում են սենսորների IFOV զանգվածների միջոցով։ Գյուղատնտեսական համատեքստում, օրինակ, օբյեկտի մակերեւույթը կարող է պարունակել, պիստակենիներ, ջրանցքներ, ճանապարհներ, խոտածածկույթներ եւ հետամասեր, ինչպիսիք են հողերը եւ ժայռերը։
Պատկերի օբյեկտներ՝ ֆիզիկական օբյեկտներն են եւ իրական աշխարհում (3D) գոյություն ունեցող դրանց շրջակայքը, որն ուսումնասիրության առարկան է։ Այս օբյեկտների մակերեսները նմուշառվում են սենսորների IFOV զանգվածների միջոցով։ IFOV-ի «կոշտ» կոնի հատումն օբյեկտի մակերեւույթի հետ պրոյեկտվում է սենսորային տարրի վրա, եւ այս հատումից ֆոտոնների քանակը ներկայացված է որպես պատկերի տարրեր կամ «պիքսելներ»։
Նկար 1-ը ցույց է տալիս, թե ինչպես է պատկերի ձեւավորման համակարգը օբյեկտի որոշակի տարածքից ֆոտոններ որսում։ IFOV-ը (ակնթարթային տեսադաշտ) նեղ տեսադաշտի կոնն է, որը տեսնում է սենսորային զանգվածի վրա գտնվող մեկ պիքսելը կամ պատկերի տարրը: Երբ այս կոնը հատվում է ֆիզիկական «օբյեկտի մակերեւույթի» հետ, օբյեկտի վրա այդ որոշակի կետից (կոչվում է «գետնի լուծաչափի բջիջ» - GRC) եկող ֆոտոնն ուղղորդում եւ գրանցում է մեկ սենսորային տարրը:
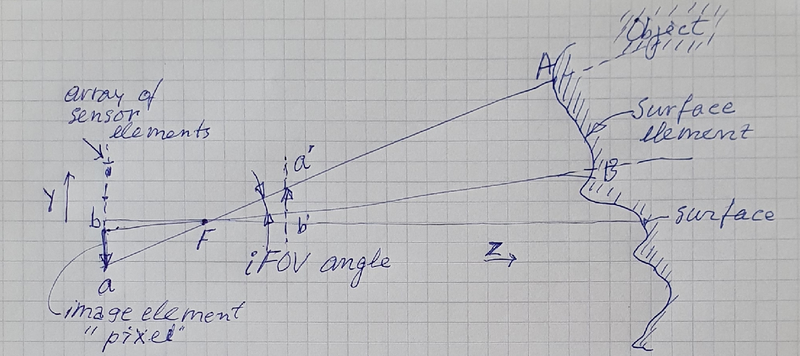
Նկար 1. Այս դիագրամը պատկերում է IFOV «կոշտ» կոնի հատումն օբյեկտի մակերեւույթի հետ, որը պրոյեկտվում է սենսորների զանգվածի սենսորային տարրի վրա (AB b,a): AB տարածքը, որը ներկայացնում է օբյեկտի մակերեւույթի ընտրված հատվածը, կոչվում է նաեւ գետնի լուծաչափի բջիջ (GRC): Ab-ում ֆոտոնների քանակը ներկայացված է որպես պատկերի տարրեր կամ «պիքսելներ» a’, b’ հարթությունում: IFOV-ը հաստատուն չէ, այլ փոփոխվում է սենսորի դիրքի հետ կապված՝ կիզակետի նկատմամբ, ինչը ցույց է տալիս օպտիկական կարգավորման եւ ընդգրված պատկերի տվյալների միջեւ դինամիկ կապը:
Պատկերի տարրեր (պիքսելներ) - Սենսորների զանգվածների տվյալները կարող են ներկայացվել որպես պիքսելների զանգվածներ (պատկերի տարրեր):
Սպեկտրալ առանձնահատկություններ - Սենսորների զանգվածները հաշվում են ֆոտոնները (որոնք նաեւ կոչվում են «թվային նիշեր – DN») առանձին սպեկտրալ միջակայքերում, որոնք կարող են վերածվել սպեկտրալ առանձնահատկությունների:
Տարածական առանձնահատկություններ - պատկերների կապակցված (հարակից) նմուշները կազմում են տարածական առանձնահատկություններով (հատկություններ) շրջաններ:
Հատկանիշների դասեր - կամ պարամետրեր, գնահատվում են նախնական գիտելիքների (GIS) կամ նախորդ արդյունքների, ինչպես նաեւ սպեկտրալ եւ տարածական առանձնահատկությունների հիման վրա:
Գնահատումը հիմնված է պատճառահետեւանքային եւ/կամ վիճակագրական մոդելների վրա, որոնք պահանջում են վերահսկելի նմուշառում:
Ուսուցման նմուշներ - հավաքվում են ուսուցման շրջանների միջոցով, որոնք հայտնի են նաեւ որպես հետաքրքրության շրջաններ (ROI): Դրանք ընտրվում են համասեռ տարածքներից եւ կարող են նշվել դասի պիտակներով կամ կլաստերի (խմբի) ցուցիչով:
Կլաստերներ (խմբեր)- սահմանվում են որպես տարածական առանձնահատկությունների հարակից կետեր (սպեկտրալ առանձնահատկություններ):
Պարամետրիկ կամ ոչ պարամետրիկ - տարածական առանձնահատկությունների կետերի խտությունը մոդելավորվում է վիճակագրական բաշխումներով (պարամետրիկ կամ ոչ պարամետրիկ):
Պատկերի շրջաններ - ունեն տարածական հատկություններ (հատկանիշներ), որոնք կարող են օգտագործվել ընտրության համար։
Ուսման ժամանակ տեղի են ունենում սպեկտրալ եւ տարածական առանձնահատկությունների միջեւ փոխազդեցություններ։