Remote Sensing Image Classification Հեռազննման պատկերների դասակարգում

Reading time
Content
Հեռազննումը ներառում է սենսորների միջոցով օբյեկտի մակերեւույթի մասին տվյալների հավաքագրում, որոնք այնուհետեւ մշակվում են՝ արժեքավոր տեղեկատվություն ստանալու համար, հաճախ քարտեզների կամ թեմատիկ դասակարգումների տեսքով: Պատկերի դասակարգումն այս գործընթացի հիմնական մեթոդն է, որը պատկերի չմշակված տվյալները վերածում է առանձնահատկությունների դասերի կամ թեմատիկ քարտեզների, ինչպիսիք են հողածածկույթի քարտեզները: Դասակարգված պատկերները ծառայում են որպես մուտքային տվյալներ երկրատեղեկատվական համակարգերի (ԵՏՀ) համար՝ աջակցելով բազմազան վերլուծությունների եւ որոշումների կայացման ընթացքում: Օրինակ, Եւրոպական հանձնաժողովը պահանջում է, որ ազգային կառավարությունները զտեն բերքի սուբսիդավորման դիմումները, ինչը ներառում է պատկերի դասակարգման միջոցով նախնական գույքագրումներ, որին հաջորդում են դաշտային ստուգումները:
Այս դասընթացի կիրառական խնդիրն է նույնականացնել էկրանի օբյեկտները, ինչպիսիք են պիստակի դաշտերը եւ ճանապարհները, դասակարգել եւ գնահատել դրանց պարամետրերը:
Հեռազննման պատկերների դասակարգումը գործընթաց է, որն օգնում է հեռահար եղանակով ստացված պատկերներից տեղեկատվություն ստանալ՝ պիքսելները որոշակի առանձնահատկությունների դասերի պիտակների կամ թեմատիկ դասերի վերագրելով՝ հիմնվելով դրանց բնութագրերի վրա: Սա մեքենայական ուսուցման մեթոդ է, որը թույլ է տալիս համակարգչին որոշակի պայմանների համապատասխան մեկնաբանություններ անել: Այս գործընթացը հեռազննման պատկերները վերածում է հողածածկույթի տեսակների (դասերի), ինչպիսիք են հողի տիպերի կամ մշակաբույսերի հիվանդությունների քարտեզները, այդ թվում՝ պիստակենիների հետ կապվածները: Պատկերների դասակարգման հիմնական ենթադրությունն այն է, որ հատկանիշների տարածության որոշակի մասը համապատասխանում է որոշակի դասի, այսինքն՝ սպեկտրալ առումով նման պիքսելները խմբավորվում են՝ ձեւավորելով համապարփակ կլաստերներ (խմբեր):
Պատկերի տարածություն
Հեռազննման մեջ ռադիոմետրիկ չափումները հիմնականում սենսորի ելքային տվյալներն են: Այս նպատակով սենսոր կարող է լինել RGB տեսախցիկը կամ արբանյակային բազմասպեկտրալ տեսածրիչը (սքաներ), ինչպիսին է Sentinel-2-ը:
Թվային պատկերը երկչափ մատրից է, որտեղ բնորոշ տարրը նշանակվում է որպես (xi, yj), որտեղ i=1, 2 ..., r եւ j=1, 2 ..., c (որտեղ r-ը տողերի, c-ն՝ սյուների քանակն է): Պատկերի յուրաքանչյուր տարրի համար ֆոտոնների քանակի հավաքածուն հասանելի է մի քանի սպեկտրալ շերտերում (կոչվում է «պատկերի տարածություն» - Նկար 2):
Ենթադրենք, որ նշանակում են d(xi, yj) այն նմուշները, որոնք համապատասխանում են N-աչափ տարածության D հարթություններին պատկերի նմուշի դիրքում (xi, yj), որտեղ N-ը սպեկտրալ շերտերի քանակն է: Սենսորի ելքային տվյալը N չափումների հավաքածու է, որոնցից յուրաքանչյուրը համապատասխանում է մեկ տեսածրիչի ալիքին: Մեկ նմուշին վերաբերող բոլոր չափումների հավաքածուն միավորվում է չափումների վեկտորի մեջ՝
d = [d1 d2 … dN]T
որտեղ T-ն մատրիցի տեղափոխության օպերատորն է։ Չափման d(xi, yj) վեկտորը այնուհետեւ կրճատվում է մինչեւ d: Վեկտորները նշվում են թավ տառերով (օրինակ՝ d կամ p):
d-ի N չափողականությունը որոշում է դասակարգման համար օգտագործվող շերտերի քանակը.
N = dim(d) = number of measurements (or bands)
d չափման վեկտորը ցույց է տալիս N-աչափ տարածության D հարթությունում մեկ կետ։ Չափումները ներկայացված են որպես թվային տվյալներ՝ ֆոտոնների հաշվարկի ֆիզիկական չափումով։
Վերջապես, d-ն ամրագրված ժամանակում բազմասպեկտրալ տվյալների հեռահար հավաքածու է։
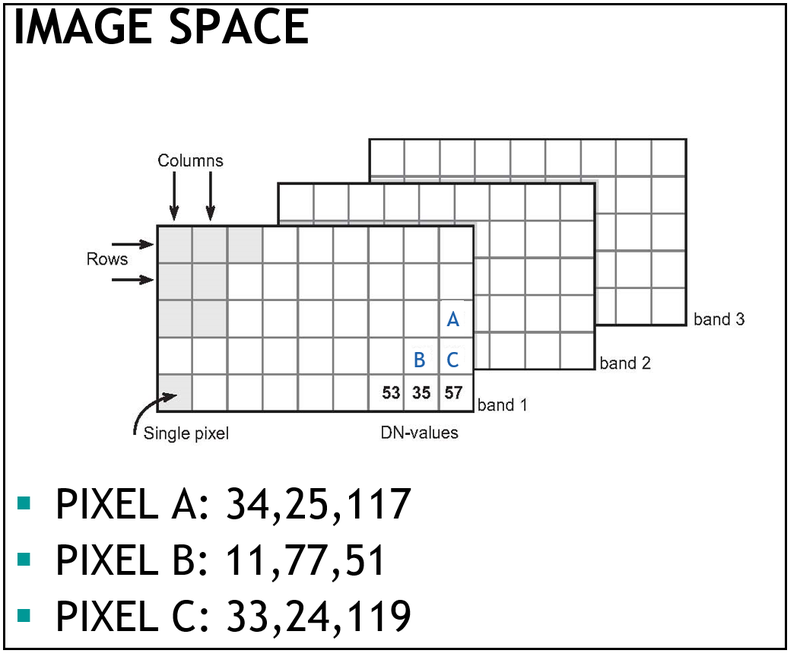
Նկար 2. Պատկերի ֆայլը պարունակում է սենսորի յուրաքանչյուր սպեկտրալ շերտի համար թվային պատկերում: Յուրաքանչյուր շերտի համար ֆոտոնների քանակը կամ DN արժեքները պահվում են տող-սյունակ դասավորությամբ: N = 3 (շերտերի քանակը):
Հատկանիշների տարածություն
Երկշերտ պատկեր դիտարկելիս կարող ենք ասել, որ սենսորի «մակերեւութային տարրի» կամ սենսորի GRC-ի երկու DN-ները 2D վեկտորի [d1, d2] բաղադրիչներ են, որոնք կազմում են հատկանիշների վեկտոր (նկար 3): Հատկանիշների վեկտորի օրինակ է [13, 55]-ը, որը ցույց է տալիս, որ 1-ին եւ 2-րդ շերտերի հարակից պիքսելներն ունեն 13 եւ 55 DN: Այս վեկտորը կարող է գծագրվել երկչափ գծապատկերով:
Նման կերպ, բջջի հատկանիշների եռաչափ վեկտորը [d1, d2, d3] կարող ենք պատկերել եռաչափ գծապատկերի վրա գտնվող եռաշերտ պատկերին: Հատկանիշների վեկտորները ցույց տվող գրաֆիկը կոչվում է հատկանիշների տարածություն կամ հատկանիշների տարածության գծապատկեր կամ ցրման գրաֆիկ: Նկար 3-ը ցույց է տալիս է, թե ինչպես է հատկանիշային վեկտորը (մեկ GRC-ի հետ կապված) արտապատկերվում հատկանիշային տարածության մեջ երկու եւ երեք շերտերի համար: Առավել տարածված են հատկանիշային տարածության երկչափ գծապատկերները։
Պետք է նկատի ունենալ, որ արժեքների կառուցումն ավելի դժվար է քառաչափ կամ ավելի դեպքերում, չնայած հայեցակարգը մնում է նույնը: Չորս կամ ավելի շերտերի հետ աշխատելիս գործնական լուծում է երկու շերտերի բոլոր հնարավոր համակցություններն առանձին-առանձին գծելը: Չորս շերտի համար սա արդեն տալիս է վեց համակցություն՝ շերտեր-1 եւ 2, 1 ու 3, 1 եւ 4, 2 ու 3, 2 եւ 4, 3 ու 4:
Պատկերների հատկանիշային վեկտորների բոլոր զույգերի կառուցումը տալիս է ցրման գծապատկերների հավաքածուի ցրման երկչափ գրաֆիկ (Նկար 4): Ցրման երկչափ գծապատկերը տեղեկատվություն է տրամադրում երկշերտ պատկերում հանդիպող պիքսելային արժեքների զույգերի մասին: Պետք է նկատի ունենալ, որ որոշ համակցություններ ավելի հաճախ կհանդիպեն:
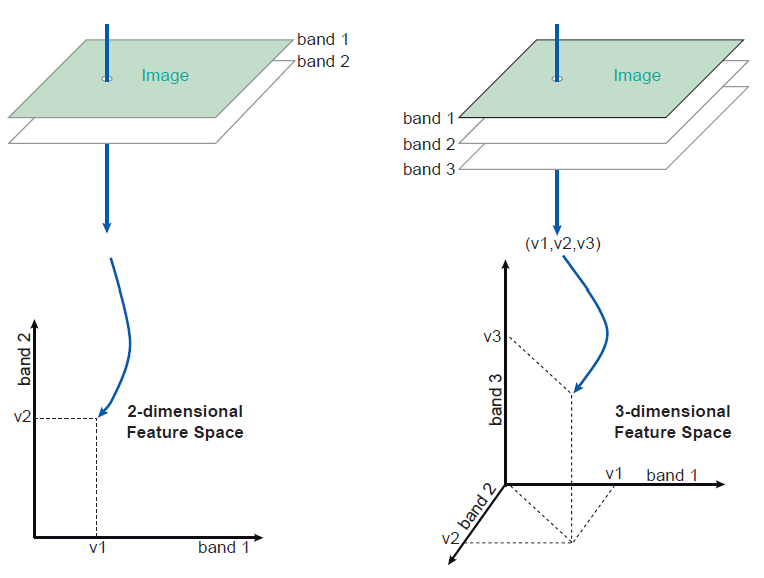
Նկար 3. Հատկանիշների տարածությունում GRC պիքսելային արժեքների կառուցումը երկու եւ երեք ալիքային պատկերների համար
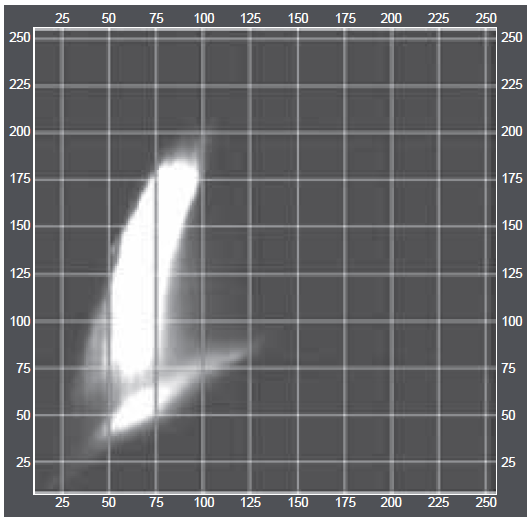
Նկար 4. ՀԶ պատկերի երկու շերտի ցրման գծապատկեր։ Ուշադրություն դարձնել x եւ y առանցքների վրա գտնվող միավորներին։ Հատկանիշների տարածության որոշակի կետում ինտենսիվությունը կապված է այդ կետում բջիջների քանակի հետ։
3.3 Սպեկտրալ հատկանիշներ
Պատկերի դասակարգման նպատակն է պիքսելները վերագրել օբյեկտների որոշակի դասերի՝ հիմնվելով դրանց սպեկտրալ հատկանիշների (այսինքն՝ դրանց հատկանիշների վեկտորների) վրա՝ համեմատելով դրանք հատկանիշների տարածության նախապես սահմանված կլաստերների (խմբերի) հետ։
Ցուցադրման համար RGB ալիքների քարտեզագրումը - Պատկերների ցուցադրման համակարգչային էկրանները սովորաբար պատկերի տվյալները վերածում են անընդհատ անալոգային պատկերի՝ օգտագործելով էկրանի կարմիր, կանաչ եւ կապույտ (RGB) հիմնական գույները։ Դրան հասնելու համար բազմասպեկտրալ պատկերի երեք շերտը մշակվում են որոնման (փոխակերպման) աղյուսակների (LUT) միջոցով, որոնք ֆոտոնների քանակը (դրանց ամբողջ թվերը) վերածում են կարմիր, կանաչ եւ կապույտ ցուցադրման ալիքների։ 24-բիթային ցուցադրման համակարգում յուրաքանչյուր շերտ վերագրվում է ցուցադրման գույներին համապատասխանող երեք 8-բիթային ամբողջ թվերից մեկին (R, G, B): Սակայն, RGB-ն ընկալման առումով միատարր չէ. թվային նման տարբերությունները պարտադիր չէ, որ նշանակեն նմանատիպ տեսողական տարբերություններ։
Երեք RGB սպեկտրալ շերտերով պատկեր դիտարկելիս, երեք շերտերը ձեւավորում են եռաչափ առանձնահատկությունների վեկտոր։ Այս վեկտորը հնարավոր է պատկերել եւ գծել եռաչափ գծապատկերի վրա, որը կոչվում է առանձնահատկությունների տարածություն կամ ցրման գրաֆիկ։ Այս հասկացությունն ուղղակիորեն նման է « RGB խորանարդ տարածությանը»։
3.3.1 Խորանարդային տարածություններ
Պատկերները հաճախ ներկայացվում են RGB (կարմիր, կանաչ, կապույտ) գունային տարածությունում: Յուրաքանչյուր պիքսել ունի երեք արժեք:
RGB գունային խորանարդը RGB (կարմիր, կանաչ, կապույտ) տվյալների հայեցակարգային ներկայացումն է: Այն գործում է որպես պատկերման համար տվյալների տարածություն՝ ստացված եռաշերտ սենսորներից, ինչպիսիք են RGB տեսախցիկները: Ահա գունային խորանարդի բովանդակությունը.
RGB խորանարդային տարածությունը եռաչափ առանձնահատկությունների տարածություն է, որը հատուկ նախագծված է եռաշերտ հեռազննման տվյալների ցուցադրման եւ մշակման համար, որտեղ յուրաքանչյուր առանցք ներկայացնում է կարմիր, կանաչ կամ կապույտ միջակայքերի ֆոտոնների մասշտաբավորված քանակը:
Չափումներ եւ տվյալների բջիջներ - երբ RGB տվյալները մասշտաբավորվում են մինչեւ բայթերի միջակայք (0-255), գունային խորանարդը կարելի է համարել որպես 256^3 կամ 2^24 տվյալների բջիջներ կամ եռաչափ բջիջներ պարունակող:
Այս «գունային խորանարդը» տեսողականորեն ներկայացնում է կարմիր, կանաչ եւ կապույտ ֆոտոնների քանակի արժեքների բոլոր հնարավոր համակցությունները: Այս եռաչափ տարածության առանցքները համապատասխանում են կարմիր, կանաչ եւ կապույտ բաղադրիչների ինտենսիվությունների: 8-բիթանոց մեկ ալիքի համակարգի համար այս խորանարդը տատանվում է (կարմիր = 0, կանաչ = 0, կապույտ = 0) (սեւ) մինչեւ (կարմիր = 255, կանաչ = 255, կապույտ = 255): Սեւը (RGB = 0) ներկայացնում է այս խորանարդի ընդհանուր սկզբնակետը, իսկ առավելագույն արժեքները (օրինակ՝ յուրաքանչյուր ալիքի համար 255) ներկայացնում են ֆոտոնների քանակի մասշտաբով որոշվող հագեցվածության մակարդակները: Այս «գունային խորանարդը» եռաշերտ տվյալների համար առանձնահատկությունների տարածության հատուկ տեսակ է, որը թույլ է տալիս սպեկտրալ տեղեկատվությունը պատկերել երեք չափումներով, նման այն բանին, թե ինչպես կարելի է երկշերտ պատկերը ցուցադրել երկչափ ցրման գծապատկերում:
Պատկերների դասակարգման համար նման տարածության օգտագործման հիմնական սկզբունքն այն է, որ տարբեր նյութեր (կամ հողային ծածկույթի տեսակներ) ցուցաբերում են տարբեր սպեկտրալ բնութագրեր: Հետեւաբար, սպեկտրալ առումով նման պիքսելները խմբավորվելու միտում ունեն՝ կազմելով այս բազմաչափ առանձնահատկությունների տարածությունում կոմպակտ խմբեր (կլաստերներ), ներառյալ RGB խորանարդի տարածությունը:
Այլ գունային տարածությունների հետ համադրում
Սեգմենտացիայի եւ խմբավորման արդյունավետությունը բարելավելու համար պատկերները հաճախ RGB-ից փոխակերպվում են այլընտրանքային գունային տարածությունների (աղյուսակ 1):
RGB գունային խորանարդի պարունակությունը եւ մակերեւույթը կարող են համադրել/համակցել այլ կոորդինատային համակարգերի: Օրինակ, այն կարելի է բաժանել հետեւյալ կերպ.
Ինտենսիվություն (I) - սա բազմապատկիչ գործոն է, որը սովորաբար կարմիր, կանաչ եւ կապույտ ֆոտոնների քանակի գումարն է (մասշտաբավորված մինչեւ թվային միջակայք), օրինակ՝ (կարմիր+կանաչ+կապույտ)/3: Լուսավորության պայմանները, ինչպիսիք են ստվերները եւ մգեցումը, կարող են ազդել «ինտենսիվության» գործոնի վրա:
Ուղղահայաց գունային հատկանիշներ (m1, m2) երկու ուղղահայաց առանցք են, որոնք սահմանում են նորմավորված գումարով գունային տարածության մեջ գունային եռանկյունին: Այս m1m2I փոխակերպումը քանակական վերլուծության համար նախընտրելի է HSV-ի (երանգ, հագեցվածություն, արժեք) նման համակարգերից, քանի որ m1-ը եւ m2-ը մաթեմատիկորեն անկախ են եւ ցածր հագեցվածության դեպքում չեն տուժում աղմուկի ուժեղացումից՝ ի տարբերություն երանգի: Ուղղահայաց առանցքների օգտագործման հայեցակարգն ընդհանրացվում է սպեկտրալ միջակայքերի ցանկացած քանակի համար: Վերլուծության նպատակը - գունային RGB խորանարդից չմշակված տվյալների (որոնք կարող են լինել փոխկապակցված եւ ավելորդ) փոխակերպումը m1, m2 եւ
I-ի նման հատկանիշների, վերջիններիս արտահանման ձեւ է: Նպատակն է առանձնացնել հնարավոր տեղեկատվությունն ավելորդ տվյալներից եւ ապահովել օբյեկտի անդրադարձման հարաբերական բնութագրերի առավել կայուն եւ հուսալի ներկայացումը, որը կարեւոր է այնպիսի խնդիրների համար, ինչպիսին է օբյեկտների դասակարգումը։
| Գունային տարածություն | Բաղադրիչներ | Ինչու կիրառել հատվածավորման ժամանակ |
|---|---|---|
| I | Ինտենսիվություն (I) | Սա բազմապատկիչ գործոն է, կարմիր, կանաչ, կապույտ ֆոտոնների քանակների բնորոշ գումարն է (մասշտաբավորված մինչեւ թվային միջակայք), ինչպես օրինակ (կարմիր+կանաչ+կապույտ)/3. |
| HSV | Երանգ, հագեցվածություն, արժեք | Գույները բաժանում է ինտենսիվությամբ: Երանգը շատ հարմար է առանց լույսը հաշվի առնելու գույների ճանաչման ժամանակ: |
| m1m2I | Ուղղահայաց գունային բաղադրիչներ (m1, m2) եւ ինտենսիվություն(I) | m1m2-ն ինտենսիվության հետ միասին ուղղահայաց (I) գունային հատկանիշներ են, այլընտրանքային կոորդինատային համակարգի ձեւ, RGB (կարմիր, կանաչ, կապույտ) ՝ տվյալների ներկայացման համար |
| Նորմավորված RGB | r = R/(R+G+B) եւն | Փոքր հաստատուն (օր.՝ 0.001), որը հաճախ ավելացնում են հայտարարին՝ 0-ի վրա բաժանումը կանխելու համար: |